robot end effector pdf
But there are many options and manufacturers and you. Download PDF Sample Report For More email protected https.

Claw Kit By Vex Robotics Inc 19 99 Whether Picking Up A 12 Oz Soda Can Or Grasping Objects As Delicate As A Feather This Claw I Vex Robotics Robot Hand Robot
Late adverb or adjective.

. The end-effector may be holding a tool or the end-effector itself may be a tool. The robot uses the end-effector to accomplish a task. Human-Robot Interface for end effectors 161 4.
1 day agoThe robot end-effector market is projected to attain a CAGR of approximately 15 over the forecast period 2022 2031. Summary This chapter contains sections titled. By definition an end effector is the device at the end of a robotic arm that allows it to interact with its environment.
There are many types of end-effectors for different types of applications. The Master plate is installed on the robot arm and locks to the Tool plate with a pneumatically-driven locking. The part of the robotic arm that grabs objects is called an end effector This wire-snare device is designed to fit over special grapple fixtures knobbed pins on the Shuttle ISS and ISS modules.
Tools Grippers are end effectors used to. This ranges from a simple gripper to sanding and video camera kits. The flexible manufacturing systems.
Their undoubted advantage is a low friction coefficient and high tensile strength that is the ratio. The gripping mechanism made use of the concept of a part-finger interface. Grippers to grasp and manipulate objects eg parts during work cycle Tools to perform a process eg spot welding spray painting.
In this eBook you will find information on the different end effectors available on the market. The unit allows robot-independent positioning over a range of -t- 15 mm in two orthogonal directions with an accuracy of better than 001 mm and a bandwidth of 20 Hz. The exact nature of this device depends on the application of the robot.
Have students think of a job that an end effector could do and design an end effector for the job. 3 Device that attaches to the wrist of the robot arm and enables the general-purpose robot to perform a specific task. The end effector is like a mechanical hand with a cylinder 332 centimeters 1307 in in diameter by 258 centimeters 1016 in deep.
An end effector is a kind of tool holder which is placed at the end of a robot. The industrial robots are one of the main automation facilities when developing the robotic process systems as part of. Introduction Classification of EndEffectors Actuator System for EndEffectors Mechanical Hands Special Tools Universal Hands Practical Implementation.
Robot Hands and EndEffectors. The same kind of tendons are used to transfer the force from the active joints to the passive ones. The Robotic Tool Changer brings flexibility to robot applications by allowing the robot to change end-effectors eg grippers vacuum cup tooling pneumatic and electric motors weld guns etc automatically.
An end effector is a tool attached to the end of a robotic arm to enable specific applications. In performing the basic process operations or maintaining the process equipment by the robot the manipulator end-effector must be oriented in accordance with the required angular object. Skip to Article Content.
File Type PDF Design Of A Robotic Arm With Gripper End Effector For together with 50 short papers and 39 poster papers were carefully reviewed and selected for inclusion in the book. This does not refer to the wheels of a mobile robot nor the feet of a humanoid robot which are not end-effectors because they are part of the robots mobility. Other aPplications in which tools are used as end effectors include dc welding.
Causes of human rights violation in nigeria. Sometimes they are referred to as end-of-arm tooling or manipulator. Some examples of end.
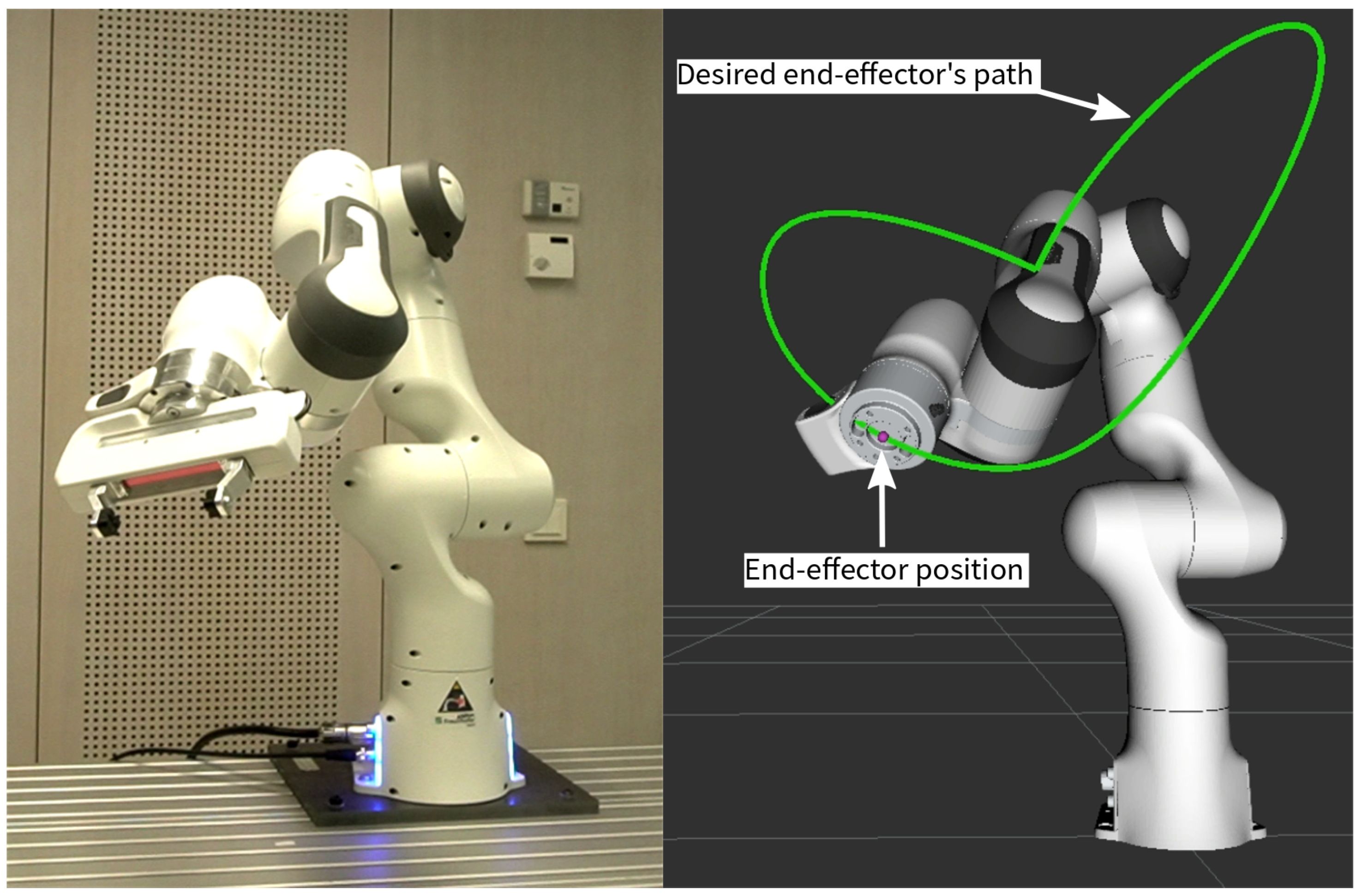
End effector on a robot manipulator platform UR5. Have Your Article Indexed in Scopus and Web of Science. The drill that would be used in this project was a Desoutter CFD 1155398 which is a manual drill meant to be held by hand and not by a robot.
Cricut joy design space tutorial. System of the driveline All actuators are connected to the active joints by the Nylon-Kevlar wire. Ad Journal of Mathematics Publishes Articles On All Aspects of Pure and Applied Mathematics.
The end effector in this case should hold a drill as well as a sensor. The end effector could wrok well on the robot manipulator shown in Figure 7. When did octopus first appear 18morecozy restaurantsconcho lounge beehive pub restaurant and more.
The design parameters are as follows. This is why each manufacturing robot needs an end effector. End effectors may consist of a gripper or a tool.
30000 companies rely on Research and Markets for their market research. The task was to design an end effector. The center point of end -effector should remain as close as possible to the same location ie.
Although distributors robotic kits sometimes include end effectors it is essential to choose the right one for your task. The design objectives are obtained from a dynamic analysis of the combined system of robot arm end effector and deburring process dynamics. This paper describes a capstone design project in developing an end -effector for robotic arm that is capable of grasping objects of varying sizes.
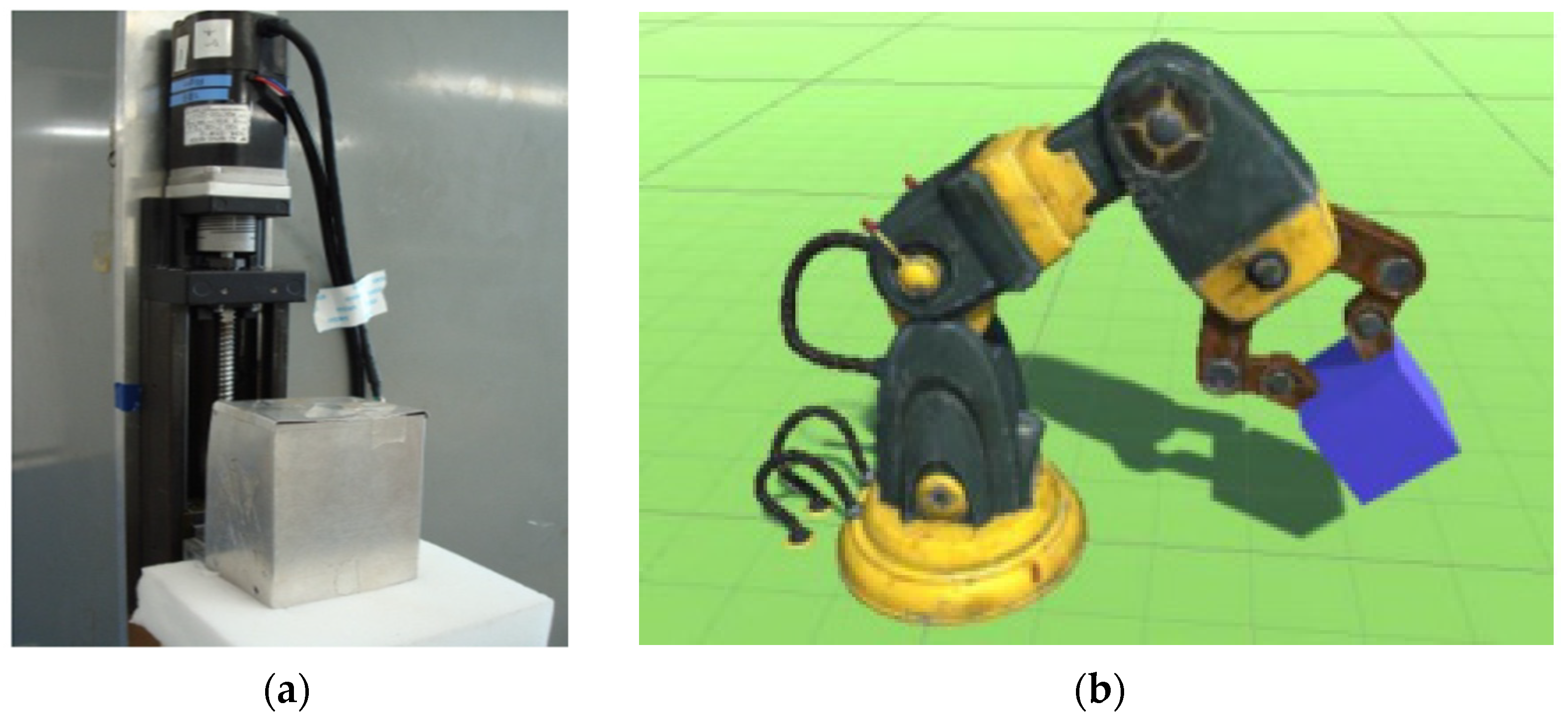
The object is grasp by finger gripper. Mechanical Engineering Laboratory. End effector system working with robot manipulator in two mode.
The papers feature current research in the field of Information Technology Networks. One of applications of industrial robots is spot welding in which Odes constitute the end effector of the robot. Skip to Article Information.
End effectors are the piece of the robot that interacts with the parts or components in the environment. In a wider sense an end effector is the part of a robot that interacts with the work environment. The object is suck by the suction.
In a wider sense an end effector can be seen as the part of a robot that interacts with the work environment. In this concept the interfaces are modelled as joints implying that the end-effector and part form a closed-loop mechanism. Artificial intelligence chatbot pdf.
Section 5-4 discusses the various end effectors was mentioned above that grippers are sometimes 1. Ziesmer 12 developed a reconfigurable end-effector shown in Figure 1b for in-hand manipulation without finger gaiting or regrasping. When referring to robotic end.
End effectors are found at the end of the robots arm. However a robot arm alone can hardly accomplish any job. This activity demonstates how an end effector is constructed to resemble a human hand.
The end effector means the last link or end of the robot. At this endpoint the tools are attached. Using April Tag to lacate the object and grasp or suck it.
A straight -line path over the range of gripper motion. Ad Access the latest telecommunications computing market data and emerging trends.

April 2014 Mechanical Engineering Design Robot Design Mechanical Design

Accesorios Para Cobots O Robots De Universal Robots
Machines Free Full Text A Review Of End Effector Research Based On Compliance Control Html

Pdf Robot Arm Manipulation Using Depth Sensing Cameras And Inverse Kinematics

Build Your Own Gif 638 1044 Electric Mandolin Plans Guitar Building Mandolin Banjo Ukulele

A Reconfigurable Robotic End Effector For Machining And Part Handling Machine Tool Simulation Semantic Scholar

314 Pentagon Robot Five Bar Robot Parallel Scara Linking To Lead End Effector Show1 Side View Youtube Five Bar Robot Scara Robot
Robotics Free Full Text Online Computation Of Time Optimization Based Smooth And Path Consistent Stop Trajectories For Robots Html

6 Axis Industrial Robots Tx2 40 Staubli

16hertz Illustrated Arduino Guide Pdf To Flipbook Arduino Flip Book Pdf Flip Book

6 Axis Industrial Robots Tx2 140 Staubli

Pdf Dq Robotics A Library For Robot Modeling And Control Semantic Scholar

6 Axis Industrial Robots Tx2 60 Staubli

Palletizer And Palletizing Robots From Kuka Kuka Ag
Pdf Robotics 1 Lecture 7 End Effectors

Pin On Robotics

Pdf Robotic Polishing With Force Controlled End Effector And Multi Step Path Planning

6 Axis Industrial Robots Tx2 90 Staubli

Read Information On Wall Tv Stand Click The Link For More Information See Our Exciting Images Robot Arm Industrial Robotic Arm Arduino